Using Node-RED for IIoT
|
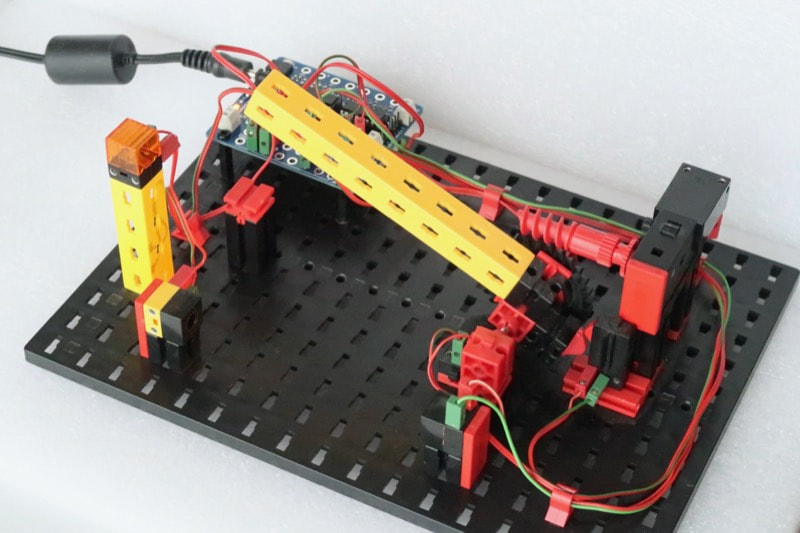
With the release of an interface board for Raspberry Pi to control the industrial models built with fischertechnik. The review of the board is available at Didacta Advance Pi-F5 interface board.
Sure, the Raspberry Pi runs on Linux and thus could not offer real-time deterministic monitoring or be considered as a PLC. However, Node-RED offers a nice graphic environment to develop the firmware that controls the industrial model. |
|
The initial flow
|
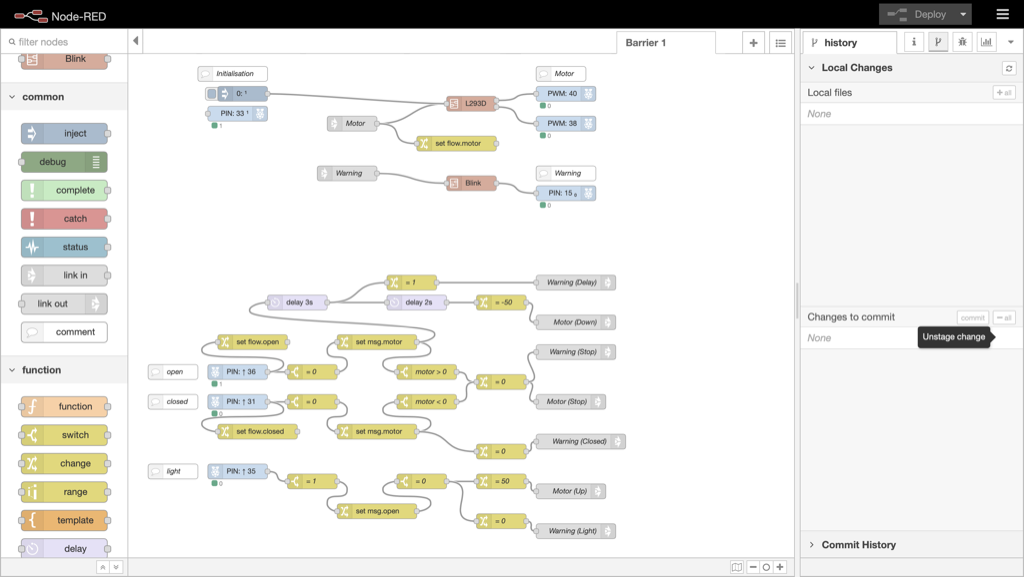
The initial flow wasn't very pretty nor easy to read, so I opted for implementing a solution based on finite-state machine.
This method relies on an abstract model that lists a finite number of states —hence the name. Inputs can change the machine from one state to another: such changes are called transitions. A last element is the initial state the machine starts with. I tried two nodes, node-red-contrib-finite-statemachine and node-red-contrib-fsm, later replaced by node-red-contrib-persistent-fsm. . |
|
Finite-state machine to the rescue
|
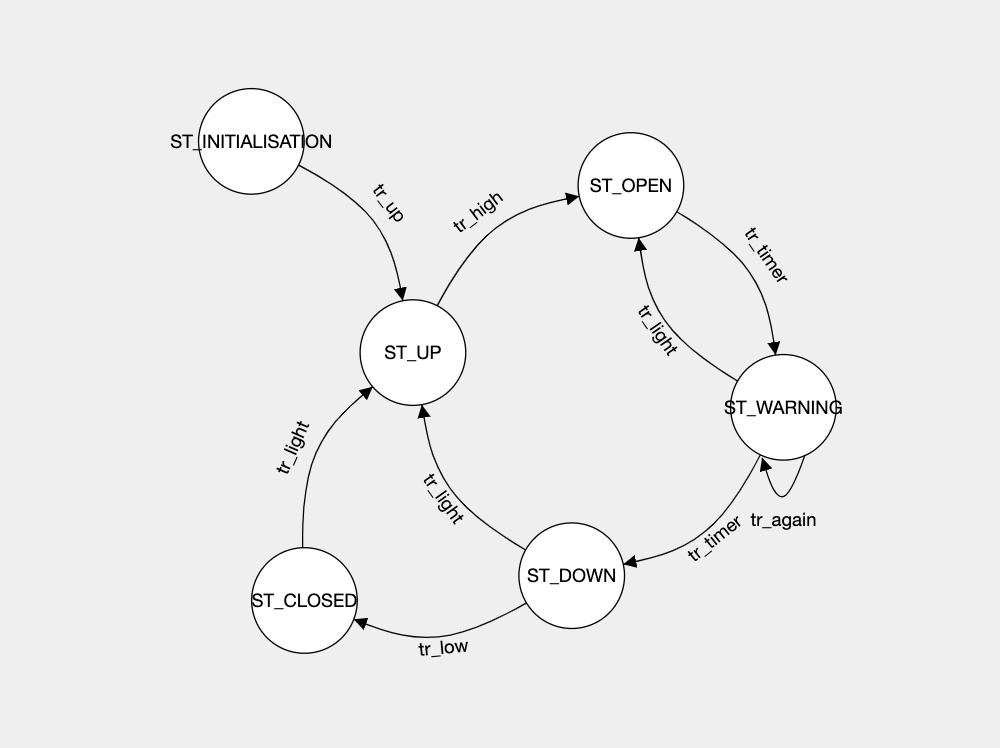
The model includes 5 states, an initial state, and 9 transitions of 6 kinds.
So the first step was to identify the states and the transitions, and draw the graph accordingly. |
|
|
The node-red-contrib-finite-statemachine node requires to enter the states and transitions as a JSON sequence, but displays them with a nice graph.
|
|
|
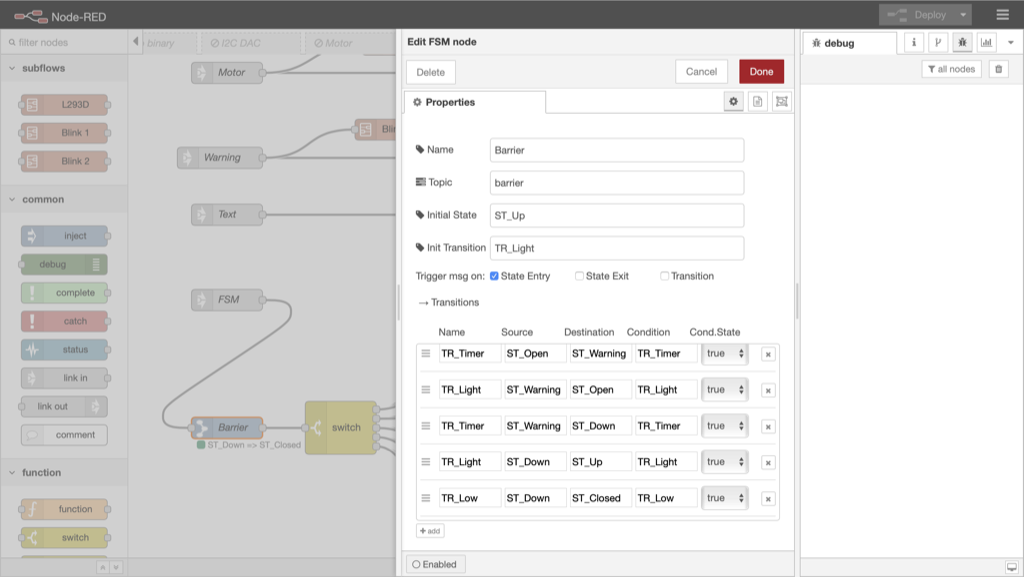
So I opted for the node-red-contrib-fsm node where states and transitions are defined in a table.
The node-red-contrib-persistent-fsm node provides a similar table for input of the states and the transitions, displays them with a nice graph. |
|
|
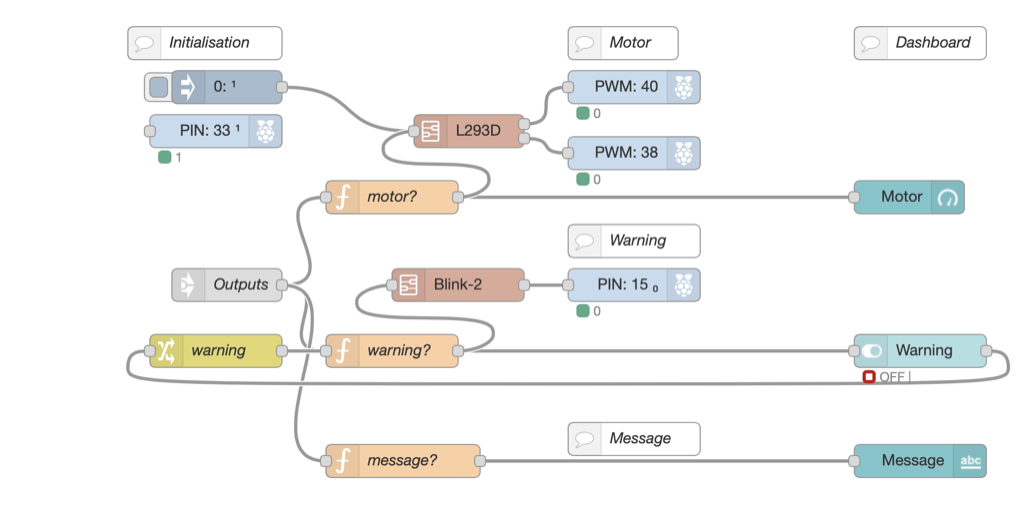
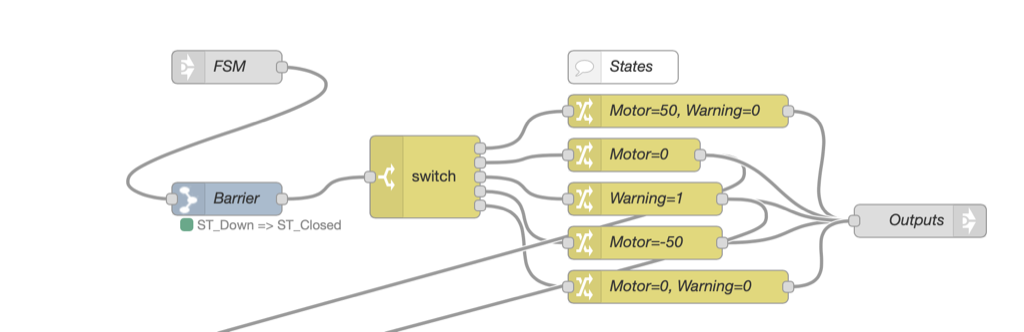
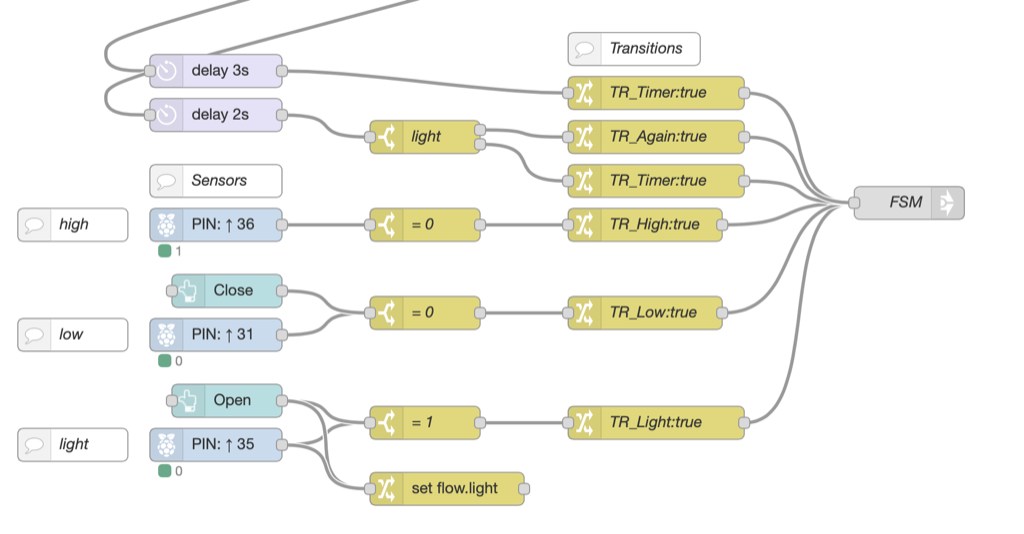
The flow consists on three parts:
|
|
|
|
|
|
Conclusion
|
Turning the initial flow into a finite-state machine was quick and easy. The major change is the split between the actions linked to a state and the inputs that trigger a transition.
This make the flow easier to read and maintain. |
|
Links
|
|
Posted: 06 Mar 2020 Updated: 10 Mar 2020, 21 Jun 2022, 29 Oct 2022 |
