I²C Inertial Measurement Unit
|
What's an IMU? IMU stands for inertial measurement unit (reference).
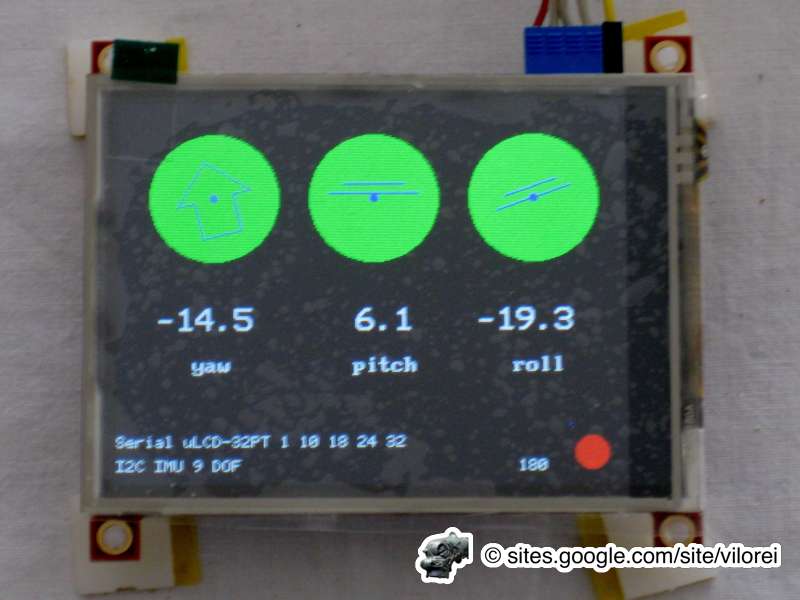
It combines a 3-axis accelerometer, a 3-axis gyroscope and a 3-axis magnetometer. Because the unit works with 9 measures, it's rated as 9 DOF, or 9 degrees of freedom. All the sensors are connected on the same I2C bus. This is another example of the power, versatility and ease of use of this protocol! Typical output consists on three angles : yaw, pitch and roll. Other possible representation is based on the Euler angles. Basically, the IMU tells where the robot goes: North or South (no pun intended), up or down, right part lower or higher then left part. |
|
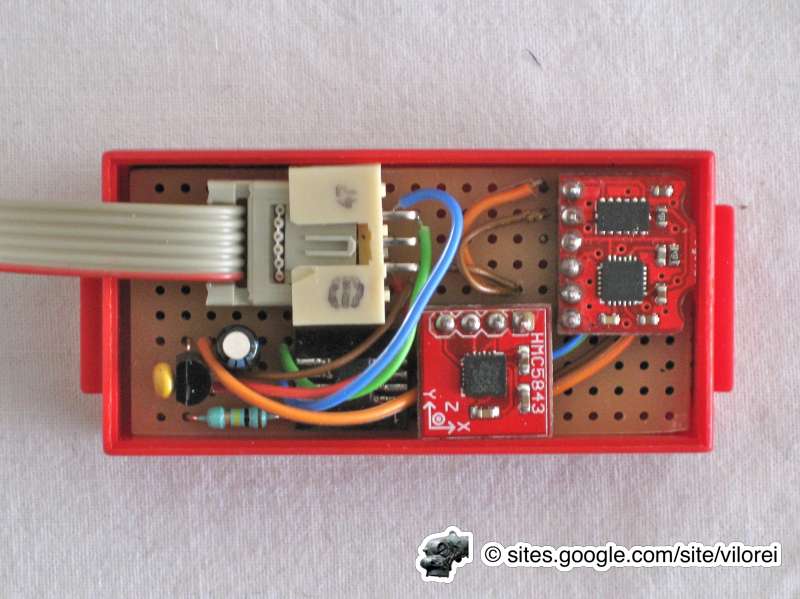
As usual, I put all the sensors and the required electronics in a nice fischertechnik 9V red box.
Required electronics include a voltage converter and an I²C logic level converter (hidden). I use the standard I²C connector I've already used. |
|
|
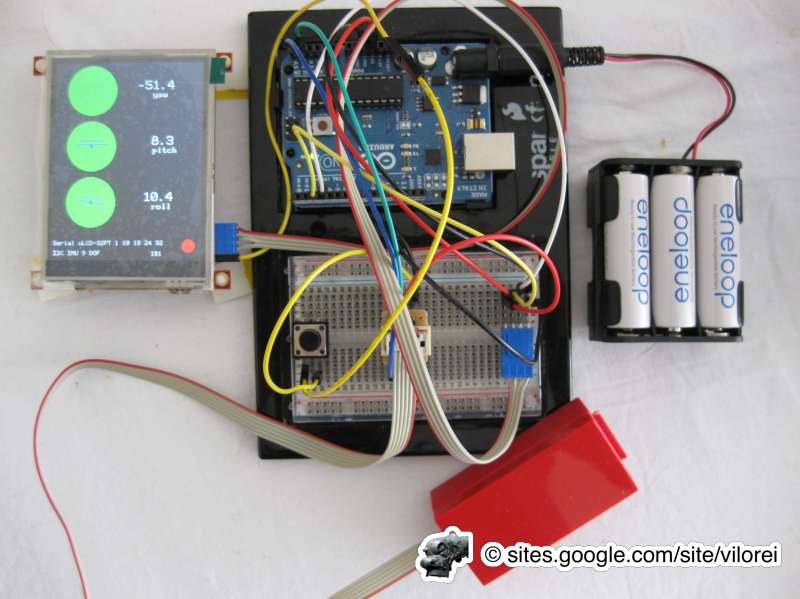
For the moment, I'm testing the IMU on the Arduino environment.
The software includes three parts:
I've grabbed ideas and pieces of code from here and there and even from a MoS thesis Using Arduino for Tangible Human Computer Interaction. My real work was to glue all the pieces together. |
|
|
The output consists on three angles:
|
|
